
The increasing integration of digital connectivity in modern vehicles has elevated the importance of cybersecurity, particularly in the Controller Area Network (CAN) bus system.
Originally designed for efficient communication between Electronic Control Units (ECUs), the CAN bus lacks built-in security measures, making it a prime target for cyber threats.
Don’t want to miss the best from TechLatest?
Set us as a preferred source in Google Search
and make sure you never miss our latest.
This paper explores the vulnerabilities of the CAN bus, including the lack of authentication and encryption, susceptibility to denial-of-service and replay attacks, and the growing risks posed by wireless connectivity.
To address these challenges, we present a multi-layered approach to CAN bus security, incorporating Intrusion Detection and Prevention Systems (IDPS), message authentication and encryption, secure gateways, network segmentation, and Secure Boot mechanisms.
A key contribution of this study is the analysis of deep neural networks for anomaly detection, which enables real-time identification of malicious activity.
Additionally, we examine the effectiveness of cryptographic authentication and lightweight encryption techniques in safeguarding in-vehicle communications.
The findings highlight the critical need for a proactive cybersecurity strategy, emphasizing AI-driven security solutions, post-quantum cryptography, and blockchain-based protection to combat evolving attack vectors.
By implementing these defenses, the automotive industry can enhance vehicle safety, protect data integrity, and fortify consumer trust in an increasingly connected landscape.
Introduction: The Unseen Threats in Connected Vehicles
As vehicles evolve into sophisticated digital machines, the importance of cybersecurity in the automotive industry has never been greater.
The Controller Area Network (CAN) bus, originally developed to simplify in-vehicle communication between Electronic Control Units (ECUs), has become a prime target for cyber threats.
While its efficiency in managing vehicle functions is undeniable, its lack of built-in security protocols leaves modern vehicles vulnerable to a new breed of cyberattacks.
Cybercriminals are increasingly exploiting weaknesses in CAN networks, threatening vehicle safety, data integrity, and consumer trust.
With the rapid adoption of connected and autonomous vehicles, understanding CAN bus vulnerabilities and implementing cutting-edge protection mechanisms is no longer optional, it’s a necessity.
Why CAN Bus Security is Critical
CAN bus security is crucial as modern vehicles rely on this protocol to manage everything from engine control and braking systems to infotainment and driver assistance features.
A compromised CAN bus can lead to catastrophic consequences, including unintended acceleration, braking failure, and remote hijacking of vehicles.
The infamous Jeep Cherokee hack in 2015 demonstrated how attackers could remotely manipulate a vehicle’s functions, prompting the industry to prioritize CAN security.
A study by Miller and Valasek (2015) demonstrated that CAN bus attacks could cause steering and braking malfunctions, proving that this is not just a theoretical risk but a real-world threat.
With the rise of Vehicle-to-Everything (V2X) communication, Over-the-Air (OTA) updates, and cloud-connected fleet management, the attack surface of vehicles is expanding.
Research by Petit and Shladover (2014) shows that wireless attack vectors significantly increase the potential for remote CAN bus exploitation, making traditional security assumptions obsolete.
CAN Bus Vulnerabilities: A Deep Dive
Despite its efficiency, the CAN protocol was not designed with cybersecurity in mind. Some of the key vulnerabilities include:
1. Lack of Authentication and Encryption
Unlike modern communication protocols, CAN bus messages lack authentication mechanisms, meaning any ECU on the network can send and receive messages without verification.
Attackers exploiting unauthorized physical or remote access can inject malicious commands, potentially overriding safety-critical functions.
Studies by Woo and Kim (2015) indicate that adding message authentication codes (MACs) could prevent spoofing attacks, but implementation remains a challenge due to bandwidth constraints.
2. Broadcast Communication Model
Since all ECUs share the same bus and receive all transmitted messages, a single compromised node can manipulate vehicle behavior.
Research by Checkoway et al. (2011) found that compromising an infotainment system can allow lateral movement across the CAN network, affecting critical vehicle systems.
3. Denial-of-Service (DoS) Attacks
A common CAN bus attack involves flooding the network with high-priority messages, overwhelming the system, and blocking legitimate signals.
A study by Choi et al. (2018) demonstrated that DoS attacks could cause airbag malfunctions, braking failures, and dashboard anomalies.
4. Replay Attacks
Attackers can capture valid CAN messages and resend them later, making it difficult for vehicles to distinguish between legitimate and fraudulent commands.
Groll and Rieke (2019) propose cryptographic timestamps to mitigate replay attacks, though real-world implementation faces computational overhead challenges.
5. Remote Exploits and Wireless Attack Surfaces
The integration of Wi-Fi, Bluetooth, and cellular communication expands attack vectors beyond physical access.
Research by Koscher et al. (2010) confirmed that wireless connectivity could be exploited to remotely inject CAN bus commands, demonstrating the need for enhanced gateway security.
Securing the CAN Bus: Present and The Future
To combat these vulnerabilities, industry leaders are deploying a multi-layered approach combining hardware and software security strategies.
1. Intrusion Detection and Prevention Systems (IDPS)
Signature-based detection is a fundamental technique used in Intrusion Detection and Prevention Systems (IDPS) to identify known cyber threats in automotive CAN networks.
This method relies on a database of predefined attack signatures unique patterns associated with malicious activities, such as unauthorized command injections, replay attacks, or spoofed ECU messages.
When CAN bus traffic is monitored, the system compares each message against these stored signatures to detect and flag suspicious activities in real-time.
Anomaly detection through Deep Neural Networks (DNN) is an advanced method specifically designed to address vulnerabilities within the Controller Area Network (CAN).
As the CAN bus lacks native security features such as authentication and encryption, it becomes highly susceptible to cyber threats, including ransomware attacks.
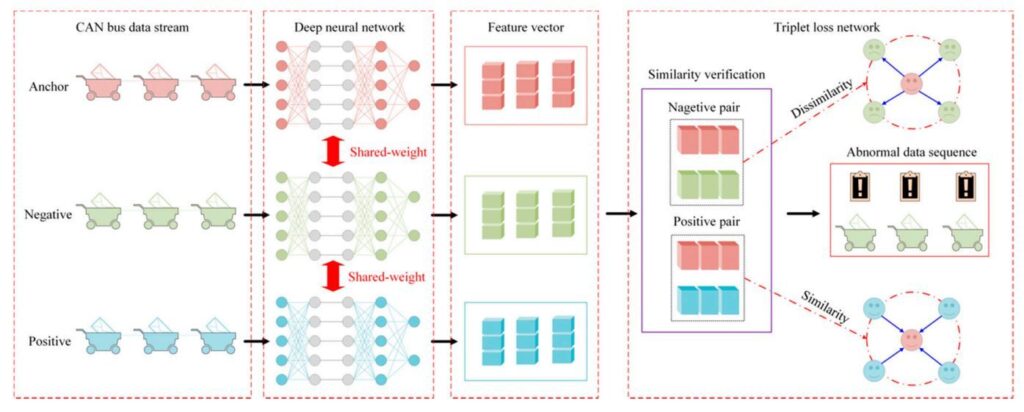
To address this, recent research by Zhou et al. (2019) proposed an innovative system that leverages deep neural networks for real-time anomaly detection of CAN bus messages.
This method involves treating anomaly detection as a cross-domain modeling problem, where sequences of CAN bus data packets are processed concurrently.
Specifically, data packets are organized into three groups—anchor (known good data), positive (normal operational data), and negative (anomalous data)—and fed into a Deep Neural Network architecture employing a shared-weight training strategy.
This approach utilizes an embedded triplet loss function network, originally used in face recognition, to optimize distances between these groups.
The DNN aims to minimize the distance between anchor and positive data points (normal behaviors), while simultaneously maximizing the distance between anchor and negative data points (anomalous behaviors).
The deep neural network extracts distinctive feature vectors from CAN bus messages, which encapsulate critical behavioral patterns such as message frequencies, message ID sequences, and payload content.
When deployed in real-time scenarios, this system continuously monitors the incoming CAN messages, swiftly identifying deviations from the learned baseline behavior.
Upon detecting anomalous activity indicative of ransomware or malicious manipulation, the IDPS triggers immediate alerts and automated protective responses such as network isolation or ECU suspension.
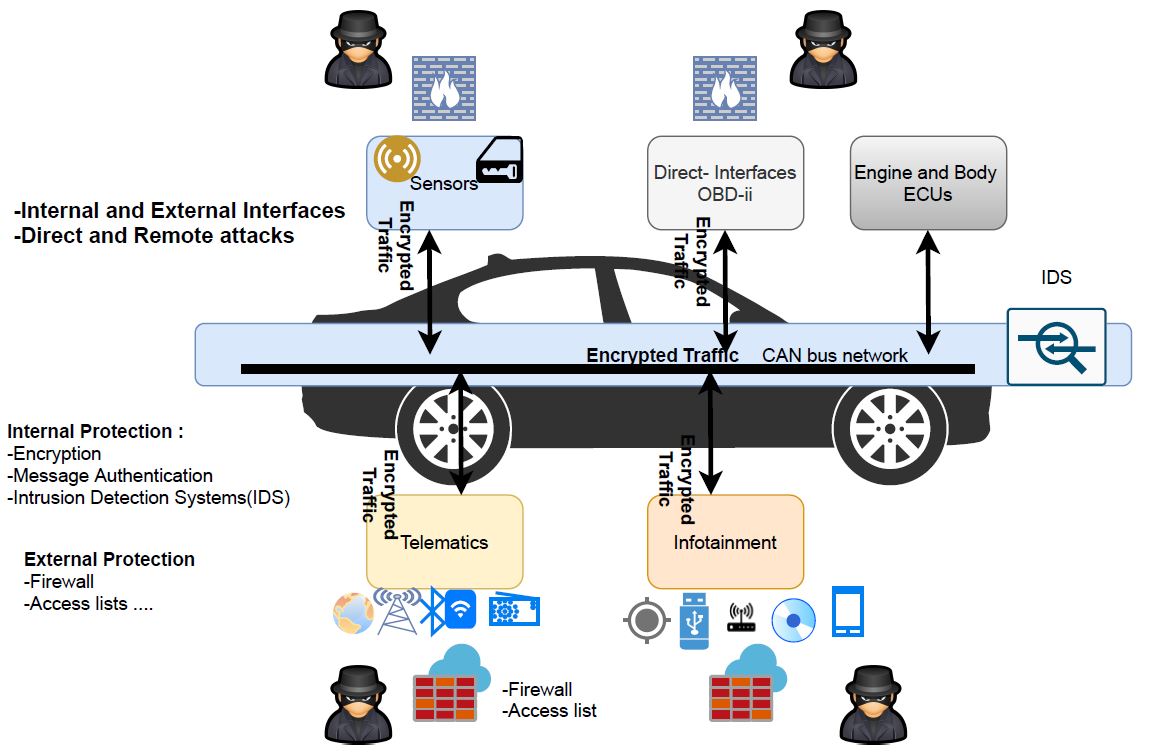
Complementing anomaly-based detection, network segmentation further fortifies CAN bus security by dividing the vehicle’s internal communication infrastructure into isolated segments.
This approach separates safety-critical systems, such as steering, braking, and airbags, from non-critical systems like infotainment and telematics. Gateway Electronic Control Units (ECUs) enforce strict communication policies, restricting lateral movements and preventing ransomware from spreading across vehicle networks.
2. Message Authentication and Encryption
Message authentication ensures messages originate from legitimate sources and remain unaltered during transmission. Techniques such as Hash-Based Message Authentication Codes (HMAC) provide a reliable and efficient solution.
Zhang et al. (2021) demonstrated the effectiveness of combining HMAC with the Tiny Encryption Algorithm (TEA), which offers strong security against unauthorized message modifications and replay attacks while imposing minimal performance overhead.
Additionally, hardware-based authentication methods, such as Physical Unclonable Functions (PUFs), use unique manufacturing characteristics of ECUs to generate secure cryptographic identifiers, significantly reducing unauthorized access risks.
Encryption complements authentication by protecting message confidentiality, ensuring that only authorized ECUs can interpret transmitted data.
Symmetric encryption methods are favored for automotive use due to their minimal computational demands, enabling quick and efficient message encryption suitable for real-time communication.
Protocols like Lightweight Encryption and Authentication Protocols (LEAP) are specifically designed for automotive environments, balancing robust security with performance requirements.
LEAP leverages lightweight, security-enhanced stream cipher algorithms to provide simultaneous authentication and encryption, ensuring secure CAN communications without introducing significant latency or resource constraints.
3. Secure Gateways and Network Segmentation
Network segmentation has emerged as a crucial cybersecurity strategy for protecting automotive Controller Area Network (CAN) buses from cyber threats.
This approach involves logically dividing the vehicle’s internal network into multiple isolated segments, each with distinct security protocols.
By restricting communication between these segments, segmentation effectively minimizes the potential for attackers to move laterally across the network, significantly limiting the spread of threats.
Even if one segment is compromised, segmentation ensures critical systems—such as braking, steering, or safety control remain secure and operationally unaffected.
Advanced implementations of network segmentation utilize gateway Electronic Control Units (ECUs) that enforce stringent communication rules and monitor network traffic in real-time.
These gateways act as dedicated security checkpoints, continuously analyzing message flows for abnormal or unauthorized activity.
If malicious behavior is detected, immediate isolation of the affected segment occurs, ensuring critical functionalities remain protected.
This method not only prevents the escalation of cyber threats but also facilitates rapid response and recovery, maintaining the safety and operational integrity of automotive systems.
4. Secure Boot and Firmware Integrity Verification
Ensuring the integrity and authenticity of firmware is paramount to protect the Controller Area Network (CAN) from potential cyber threats.
Two critical mechanisms employed to achieve this are Secure Boot and Firmware Integrity Verification. These processes work in tandem to prevent unauthorized code execution and maintain the trustworthiness of in-vehicle systems.
Secure Boot: Establishing a Chain of Trust
Secure Boot is a security protocol that ensures a vehicle’s embedded system boots using only software that is verified and trusted.
It establishes a Chain of Trust (CoT), starting from an immutable Root of Trust (RoT) embedded in the hardware, which verifies each subsequent layer of software before execution.
This process prevents the loading of malicious or tampered code during the boot sequence.
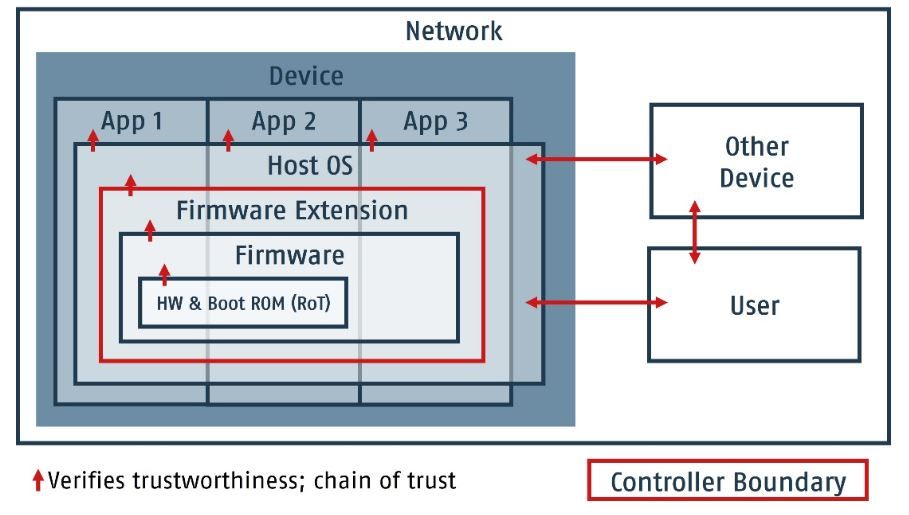
The implementation of Secure Boot involves:
- Root of Trust (RoT): An immutable component, often stored in Read-Only Memory (ROM), containing the initial code and cryptographic keys necessary for the first verification step.
- Bootloader Verification: The RoT verifies the bootloader’s digital signature using asymmetric cryptography (e.g., RSA or ECC). If the signature is valid, the bootloader is executed; otherwise, the boot process is halted.
- Operating System and Application Verification: The bootloader, now trusted, verifies the operating system and applications in a similar manner, ensuring each component is authenticated before execution.
This layered verification process ensures that only authenticated software is loaded, protecting the CAN network from potential cyber threats.
Firmware Integrity Verification: Ensuring Continuous Trust
Beyond the initial boot process, Firmware Integrity Verification continuously monitors the firmware’s integrity during runtime. This involves:
- Cryptographic Hashing: Generating a hash of the firmware code and comparing it to a known good value. Any discrepancy indicates potential tampering.
- Digital Signatures: Utilizing digital signatures to verify that firmware updates originate from trusted sources and have not been altered during transmission.
These measures ensure that any unauthorized modifications to the firmware are detected promptly, maintaining the security of the CAN network.
Implementation in Automotive Systems
Implementing Secure Boot and Firmware Integrity Verification in vehicles involves integrating these mechanisms into the Electronic Control Units (ECUs) that manage various functions within the vehicle. This integration requires:
- Hardware Support: ECUs must be equipped with hardware security modules capable of performing cryptographic operations necessary for Secure Boot and integrity checks.
- Software Architecture: The software must be designed to support secure boot sequences and runtime integrity verification without compromising performance.
A study on the S32G274A vehicle network processor demonstrated the practical integration of post-quantum secure boot mechanisms, highlighting the feasibility and importance of these security measures in modern automotive systems.
Conclusion: The Road Ahead for Automotive Cybersecurity
The rapid evolution of connected vehicles has brought unprecedented convenience, but it has also exposed critical vulnerabilities in the CAN bus architecture.
As cyber threats continue to grow in sophistication, securing automotive networks is no longer optional, it is imperative.
The research and real-world attacks highlighted in this article demonstrate the urgent need for a proactive, multi-layered defense strategy.
By integrating AI-powered anomaly detection, cryptographic authentication, secure gateways, and regulatory compliance, automakers can fortify CAN bus security against emerging cyber threats.
As technology advances, the industry must also invest in forward-looking solutions such as post-quantum cryptography, blockchain-based security, and self-healing networks to stay ahead of evolving attack vectors.
The future of automotive cybersecurity depends on a collaborative effort between manufacturers, policymakers, and cybersecurity experts.
Only through continuous innovation and vigilance can we ensure that the vehicles of tomorrow remain safe, resilient, and trustworthy.
In this high-stakes cybersecurity battle, securing the CAN bus is not just about protecting data, it’s about safeguarding lives on the road.
References
- Miller, C., & Valasek, C. (2015). “Remote Exploitation of an Unaltered Passenger Vehicle.”
- Petit, J., & Shladover, S. E. (2014). “Potential Cyberattacks on Automated Vehicles.”
- Koscher, K., Czeskis, A., Roesner, F., et al. (2010). “Experimental Security Analysis of a Modern Automobile.”
- Woo, S., & Kim, J. (2015). “A Practical Message Authentication Code for CAN Bus Security.”
- Choi, W., Woo, S., & Kim, Y. (2018). “Denial-of-Service Attacks on CAN Networks.”
- Dorri, A., Kanhere, S. S., Jurdak, R., & Gauravaram, P. (2017). “Blockchain for IoT Security and Privacy.”
- Thiruloga, S., Kukkala, V. K., & Pasricha, S. (2021). “AI-Based Anomaly Detection in Automotive Networks.”
- Zhou, Aiguo & Li, Zhenyu & Shen, Yong. (2019). Anomaly Detection of CAN Bus Messages Using a Deep Neural Network for Autonomous Vehicles.
- Zhang, et al. (2021). “Authentication Method Combining HMAC-SHA256 with Tiny Encryption Algorithm for CAN Bus Security.” SAE International.
- Siddiqui, et al. (2017). “Secure Communication over CAN Bus: A PUF-Based Mutual Authentication Framework.” ResearchGate.
Image Sources
- Image 1 source: Emad Aliwa, Omer Rana, Charith Perera, and Peter Burnap. 2021. Cyberattacks and Countermeasures for In-Vehicle Networks. ACM Comput. Surv. 54, 1, Article 21 (January 2022), 37 pages. https://doi.org/10.1145/3431233
- Image 2 Source: Zhou, & Li, & Shen,. (2019). Anomaly Detection of CAN Bus Messages Using A Deep Neural Network for Autonomous Vehicles. Applied Sciences. 9. 3174. 10.3390/app9153174.
- Image 3 source: Research article from embeddedcomputing ” Secure Boot: An Integral Security Feature for Code Storage, Operating Systems, and Data Storagel” Link: https://embeddedcomputing.com/technology/storage/secure-boot-an-integral-security-feature-for-code-storage-operating-systems-and-data-storage
This story was originally published on 21 May 2024.
Enjoyed this article?
If TechLatest has helped you, consider supporting us with a one-time tip on Ko-fi. Every contribution keeps our work free and independent.
Support on Ko-fiDirectly in Your Inbox









